ScaraBot Mathematical Simulation
Project Overview
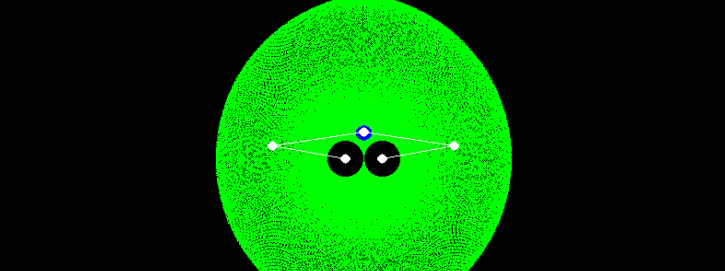
This project is a 2D graphical simulator for a 5-bar SCARA (Selective Compliance Assembly Robot Arm), built with C++ and the SDL2 library. It provides a visual representation of the robot's movement, its reachable workspace (configuration space), and demonstrates the principles of both forward and inverse kinematics. This was a personal project undertaken at the end of my first-year, second semester in university. The primary goal was to gain hands-on experience and a deeper understanding of kinematics and advanced trigonometry. It served as a practical exercise to apply theoretical knowledge from my coursework into a functional, interactive application.
Skills Used
C++
SDL2
Kinematics
Robotic Simulation
2d Rendering